En ocasiones cuando empiezas un nuevo proyecto, no sueles
tener todas las respuestas, normalmente no tienes ninguna, algo se dijo en una
reunión y se decidió emplear unos “Creepy Worm” para hacer la performance de
robots. Lo que yo entendí con “creepy worm” era un hacer un gusano lo más real
posible para que fuera como los de verdad, “creepy”. Y me puse a buscar que
había hecho por ahí. En ese momento mientras estás viendo videos de robots
gusanos, te das cuenta de otra cuestión. Que presupuesto tengo para construir
estos robots, porque el concepto “realista” difiere mucho si hablamos de 40 o
1000 euros.
Suelo decantarme por los de 40, siempre se puede buscar algo
que reciclar, dentro de mi búsqueda había visto varios:
Por razones mencionadas antes mi mejor opción era la tercera
opción, pocos actuadores y conseguir hacer un movimiento similar que permitiese
al robot desplazarse, así que me puse manos a la obra, el diseño del robot del
video realmente me gusta mucho por su sencillez, con un par de servomotores
podría hacer algo similar, pero vamos a complicarlo.
Si realizamos un montaje similar, tenemos un movimiento que
se mueve, pero difícilmente podemos decir que se desplaza, si realizamos el
mismo montaje doblado y tenemos un control doble, como dos gusanos del video
unidos por la boca, tendríamos movimientos independientes en los extremos del
robot que mediante su combinación podrían hacer una secuencia de
desplazamiento. Esto es simple teoría, pues aún no lo he montado en esa forma,
es algo que no tardare en averiguarlo.
Días más tarde comencé a tener noticias sobre los “Creepy
Worm”, debía poder llevar un móvil en la cabeza, mi plan se iba al garete, para
poder llevar un móvil como cabeza debía ser muy fuerte, hablo en términos a los
robots que normalmente fabrico, yo contaba con hacer algo de 20 o 25 cm no más
grande. No habría móvil le instalaríamos una IMU y esta enviara la señal
mediante … Aun no lo sé, piden wifi, canal de UDP para conectarse con el Ipad,
yo le iba a poner un Bluetooth conectado a un teensy, ahora debía replantearme
una raspberry pi, un arduino Yum, photon…
Pero mientras tanto estaba trabajando en el diseño de la
pieza, si quería que fuese más grande de 20 cm debía hacerlo modular y poder
hacerlo tan grande como fuera necesario, pero también requeriría más
tornillería que se traduce en más peso para el robot e imprimir más piezas.
Desde que tengo la impresora me he interesado por los
montajes de una sola impresión, esas partes móviles que se imprimen a la vez y
una pieza queda atrapada dentro de otra sin tocarse. Lo descubrí con un elefante y un coche, que no
encuentro. Eso me dio ideas para construir mecanismos, uniones y experimentar.
Lo que me dio por hacer para experimentar fue un robot de juguete articulado.
 |
| Robot |
Después de ver que si se podían hacer uniones complejas con mayor, menor solución me puse a pensar mecanismos que
podría utilizar y me ayudarían a no perder tanto tiempo en el montaje, eso me
llevo a diseñar un dedo articulado y de ahí a hacer completamente una mano, que
como otras muchas cosas no está acabada, pero que enseño a todas las visitas.
 |
| Dedo |
El día que funcione, como tengo pensado será todo un evento,
que gano con esto, tiempo, quizá lo pierda en el diseño, pero a la hora de
montar solo tengo que preocuparme de pasar los tendones, para accionarlo, en mi
caso empleo hilo de pescar de 0,80 de 1,00 mm.
Para hacer el tentáculo pensé en hacer lo mismo hacer un
mecanismo que se pueda desplazar en cualquier dirección pero que me permita
imprimirla. El mecanismo es un codo esférico, el único problema es la
limitación de tamaño que podía imprimir de esta forma, la impresora tiene el
tamaño que tiene, y más de ahí no se puede hacer nada. Así que descarte totalmente
la idea de ponerle un móvil haría algo de unos 20 cm o 25 lo que da de sí la máquina.

Modelo Modular
|

Modelo una sola impresión
|
El gusano tendría ocho eslabones y trataría de realizar dos controles
independientes para que cada uno controlase 4 de las uniones, situadas en la
cabeza y en la cola, añadí un espacio extra previendo necesitarlo para
instalarle el microcontrolador y las baterías.

El plan orinal era realizarlo con servomotores pequeños,
pero empleando servomotores de calidad, los savox, que normalmente empleaba
para las arañas, pequeñas, solo presenta un problema, que el recorrido que
realiza el servo en 180 grados no es suficiente para hacer una secuencia de
movimiento. Así que imitando cosas que funciona, hice un sistema parecido al
que utiliza el Icub es sus manos, un mismo motor acciona un tendón, por un
lado, recoge el tendón y por el otro da hilo, a diferencia de los dedos el
gusano no tendría tope físico en ninguna dirección, salvo el giro máximo que
podría realizar con la vertical, en este caso creo que 25 grados. La unión
entre los segmentos centrales del gusano la haría con goma flexible, sería una
unión pasiva, pero con juego suficiente para hacer un movimiento fluido.

Durante la impresión piezas separadas 0,4 mm
|

Extraído de la impresora
|
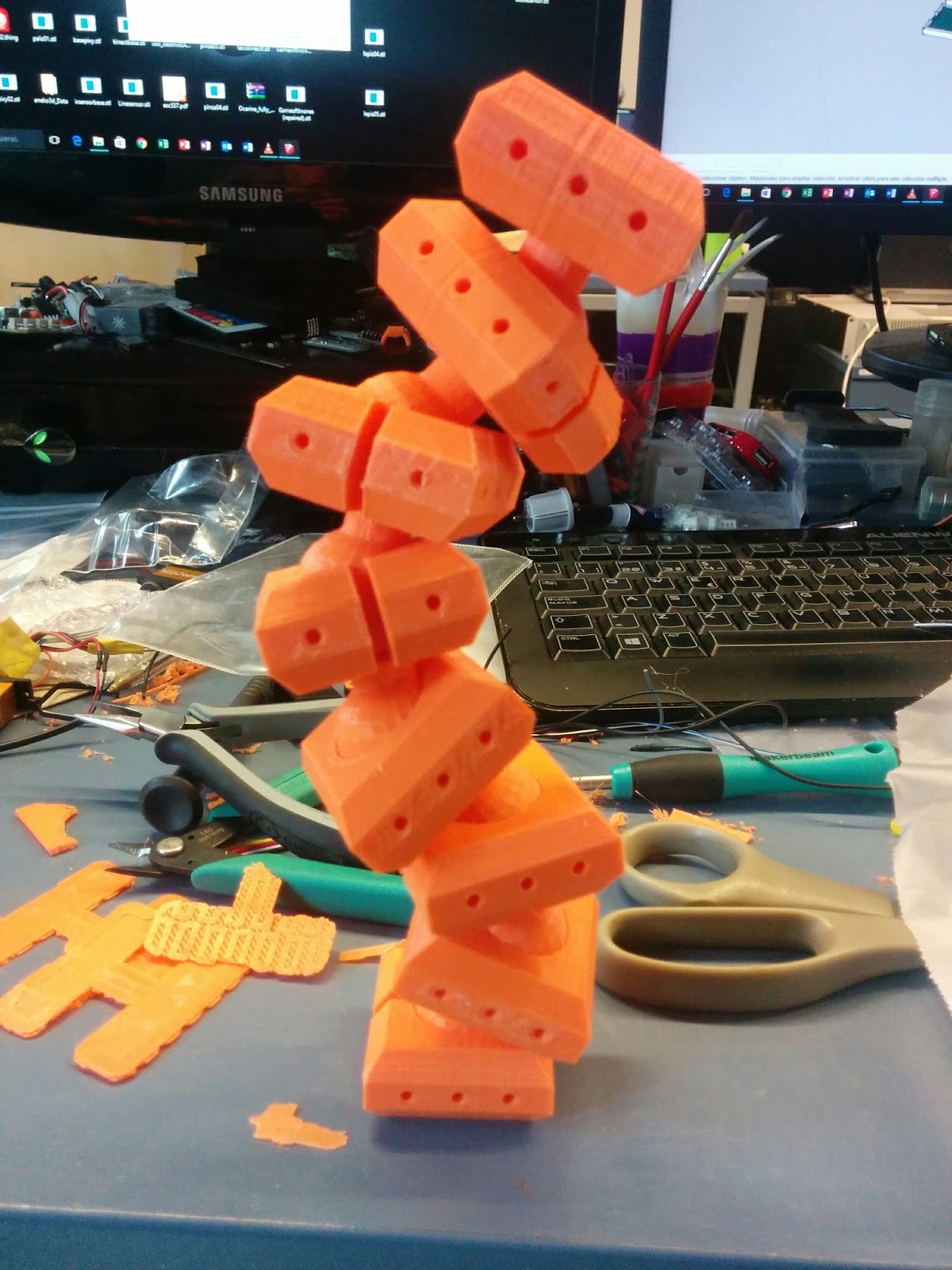
Comprobando la
movilidad, estabilidad
|
|
Cuando estaba trabajando en el mecanismo para los motores,
me llego un mail donde me ensenyaban los “creepy worm” de los que hablaron en
la reunión era de una exposición
de Pierre-Yves Oudeyer y David Lynch . Yo no veía los gusanos por ningún
lado, si tienen forma creepy, pero son mas semejantes a un baro articulado con seis
servomotores Dynamixel
una pasada de servomotores, muy fiables con indicación de posición y mucho par
motor, pero con unos precios de la leche. La verdad es que hace tiempo que
quiero probarlos, pero nunca he tenido la excusa de pedir 130 euros por servo.
Volviendo al gusano este no tiene que moverse por el suelo solo tiene que hacer
movimientos que parezcan creepy. Mi gusano se había convertido en un tentáculo,
solo necesitaría un sistema motor, que movería todo el cuerpo.
 |
La combinación de los dos motores haría que el robot se
pudiera desplazar en todas las direcciones de forma similar al video de la
instalación de David Lynch, pero esto había que probarlo. Empleando la placa
de motores que diseñe para controlar los motores de los robots.
El resultado podéis verlo en el siguiente video, el programa
que tiene instalado el Arduino es para controlar un robot de dos ruedas, con una
reducción 298:1, y con las instrucciones:
Adelante
à
los dos motores en la misma dirección à
Atrás à Los dos motores en la
misma dirección ß
Izquierda
à
sentidos opuestos M1à y M2ß
Derecha à Sentidos opuestos M1ß
y M2à
...Working Progress
Anakleto.
No hay comentarios:
Publicar un comentario